ROBOT CÓ Ý THỨC KHÔNG?
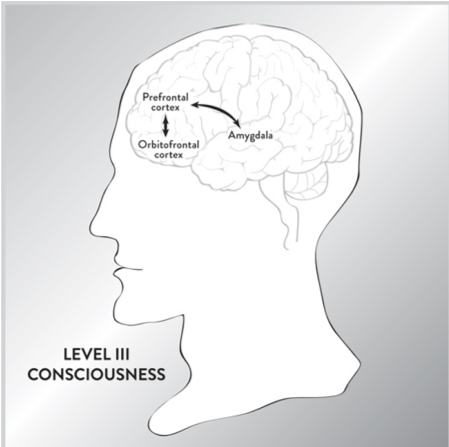
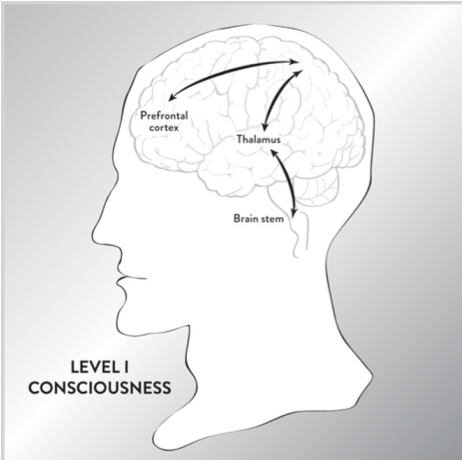
Có lẽ cách rõ ràng nhất để thấy tại sao các robot tự động thực sự chưa tồn tại là xếp hạng mức độ ý thức của chúng. Như chúng ta đã thấy trong Chương 2, chúng ta có thể xếp hạng ý thức theo bốn cấp độ. Ý thức cấp 0 mô tả máy điều nhiệt và thực vật; nghĩa là, nó liên quan đến một vài vòng phản hồi trong một số thông số đơn giản như nhiệt độ hoặc ánh sáng mặt trời. Ý thức cấp I mô tả côn trùng và bò sát, di động và có hệ thần kinh trung ương; nó liên quan đến việc tạo ra một mô hình thế giới của nó trong mối quan hệ với một tham số mới, không gian. Sau đó, chúng ta có ý thức Cấp II, tạo ra một mô hình của thế giới trong mối quan hệ với những đối tượng khác của chủng loại mình, đòi hỏi phải có cảm xúc. Cuối cùng, chúng ta có ý thức Cấp III, mô tả con người, đối tượng kết hợp thời gian và sự tự nhận thức để mô phỏng cách mọi thứ sẽ phát triển trong tương lai và xác định vị trí của chính chúng ta trong các mô hình này.
Chúng ta có thể sử dụng lý thuyết này để xếp hạng các robot ngày nay. Thế hệ robot đầu tiên ở Cấp độ 0, vì chúng ở trạng thái tĩnh, không có bánh xe hoặc bộ bước đi. Các robot ngày nay ở Cấp I, vì chúng là thiết bị di động, nhưng chúng ở bậc/mức rất thấp vì chúng gặp khó khăn rất lớn khi điều hướng trong thế giới thực. Ý thức của chúng có thể được so sánh với một con sâu hoặc côn trùng chậm. Để tạo ra hoàn toàn ý thức cấp I, các nhà khoa học sẽ phải tạo ra các robot có thể sao chép cách thực tế ý thức của côn trùng và bò sát. Ngay cả côn trùng cũng có những khả năng mà robot hiện tại không có, chẳng hạn như nhanh chóng tìm nơi ẩn nấp, định vị bạn tình trong rừng, nhận biết và trốn tránh kẻ săn mồi hoặc tìm thức ăn và nơi trú ẩn.
Như chúng ta đã đề cập trước đó, chúng ta có thể xếp hạng số lượng ý thức theo số vòng phản hồi ở mỗi cấp. Các robot có thể nhìn thấy, ví dụ, có thể có một số vòng phản hồi vì chúng có cảm biến hình ảnh có thể phát hiện ra bóng, cạnh, đường cong, hình dạng hình học, v.v., trong không gian ba chiều. Tương tự, các robot có thể nghe được yêu cầu các cảm biến, thứ có thể phát hiện ra tần số, cường độ, sự căng thẳng, tạm dừng, v.v ... Tổng số vòng lặp phản hồi này có thể tổng cộng là mười hoặc hơn (trong khi một loài côn trùng, vì nó có thể tìm kiếm trong tự nhiên, tìm bạn tình, xác định vị trí nơi trú ẩn, ect., có thể có năm mươi hoặc nhiều vòng phản hồi). Một robot điển hình, do đó, có thể có Ý thức cấp I:10.
Robot sẽ phải có khả năng tạo ra một mô hình của thế giới trong mối quan hệ với những robot khác nếu chúng tiến vào ý thức Cấp II. Như chúng ta đã đề cập trước đây, ý thức cấp II, với xấp xỉ đầu tiên, được tính bằng cách lấy số lượng thành viên trong nhóm của nó nhân với chỉ số cảm xúc và cử chỉ được sử dụng để giao tiếp giữa chúng. Robot do đó sẽ có ý thức về Cấp độ II: 0. Nhưng hy vọng, các robot cảm xúc đang được chế tạo trong phòng thí nghiệm ngày nay có thể sớm tăng con số đó.
Các robot hiện tại xem con người chỉ đơn giản là một tập hợp các pixel di chuyển trên cảm biến TV của chúng, nhưng một số nhà nghiên cứu AI đang bắt đầu tạo ra các robot có thể nhận ra cảm xúc trong nét mặt và giọng nói của chúng ta. Đây là bước đầu tiên để robot nhận ra rằng con người không chỉ là các pixel ngẫu nhiên và rằng họ còn có trạng thái cảm xúc.
Trong vài thập kỷ tới, robot sẽ dần dần vươn lên trong ý thức Cấp II, trở nên thông minh như chuột, thỏ và sau đó là một con mèo. Có lẽ vào cuối thế kỷ này, chúng sẽ thông minh như một con khỉ và sẽ bắt đầu tạo ra những mục tiêu của riêng chúng.
Một khi robot có kiến thức làm việc về lẽ thường (common sense) và Lý thuyết Tâm trí (Theory of Mind), chúng sẽ có thể chạy mô phỏng phức tạp vào tương lai với vai trò là các diễn viên tiên đoán và do đó tiền vào ý thức Cấp III. Chúng sẽ rời khỏi thế giới của hiện tại và bước vào thế giới của tương lai. Đây sẽ là câu chuyện của nhiều thập kỷ vượt quá khả năng của bất kỳ robot ngày nay. Chạy mô phỏng tương lai có nghĩa là bạn nắm vững các quy luật tự nhiên, nhân quả và lẽ thường, để bạn có thể lường trước các sự kiện trong tương lai. Điều đó cũng có nghĩa là bạn hiểu ý định và động lực của con người, vì vậy bạn cũng có thể dự đoán hành vi trong tương lai của họ.
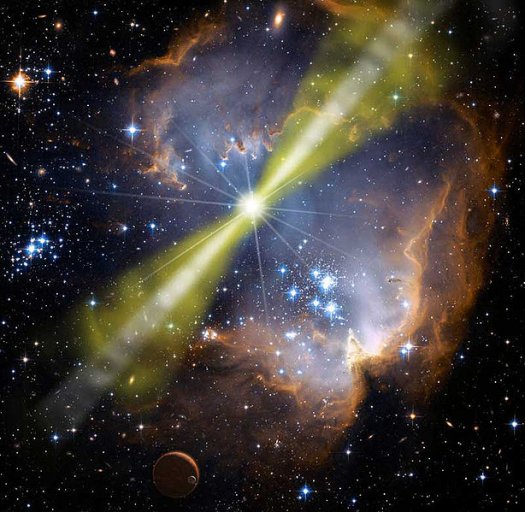
Giá trị bằng số của ý thức Cấp III, như chúng ta đã đề cập, được tính bằng tổng số liên kết nhân quả mà người ta có thể tạo ra để mô phỏng tương lai trong nhiều tình huống thực tế, chia cho giá trị trung bình của một nhóm kiểm soát. Máy tính ngày nay có thể thực hiện các mô phỏng giới hạn trong một vài thông số (ví dụ: sự va chạm của hai thiên hà, luồng không khí xung quanh máy bay, rung chuyển các tòa nhà trong trận động đất), nhưng chúng hoàn toàn không được chuẩn bị để mô phỏng tương lai phức tạp, tình huống thực tế, vì vậy mức độ ý thức của chúng sẽ giống như Cấp độ III: 5.
Như chúng ta có thể thấy, có thể mất nhiều thập kỷ làm việc chăm chỉ trước khi chúng ta có một robot có thể hoạt động bình thường trong xã hội loài người.
CÚ VA CHẠM TỐC ĐỘ CAO TRÊN ĐƯỜNG
Vậy khi nào thì robot cuối cùng có thể sánh ngang và vượt con người về trí thông minh? Không ai biết, nhưng đã có nhiều dự đoán. Hầu hết trong số chúng dựa vào luật của Moore kéo dài hàng thập kỷ trong tương lai. Tuy nhiên, định luật Moore hoàn toàn không phải là một định luật và trên thực tế, nó cuối cùng đã vi phạm một định luật vật lý cơ bản: lý thuyết lượng tử.
Như vậy luật Moore không thể tồn tại mãi mãi. Trong thực tế, chúng ta có thể thấy nó đang chậm lại. Nó có thể bị san phẳng vào cuối thập kỷ này hoặc thập kỷ tới, và hậu quả có thể rất thảm khốc, đặc biệt là đối với Thung lũng Silicon.
Vấn đề rất đơn giản. Ngay bây giờ, bạn có thể đặt hàng trăm triệu bán dẫn silicon trên một con chip có kích thước bằng móng tay của bạn, nhưng có giới hạn về số lượng bạn có thể nhồi nhét vào những con chip này. Ngày nay, lớp silicon nhỏ nhất trong chip Pentium của bạn có chiều rộng khoảng hai mươi nguyên tử và đến năm 2020, lớp đó có thể là năm nguyên tử. Nhưng sau đó, nguyên lý bất định của Heisenberg bắt đầu lên tiếng, và bạn sẽ không thể xác định chính xác vị trí của electron và nó có thể "rò rỉ" ra khỏi dây dẫn. (Xem Phụ lục, nơi chúng ta thảo luận về lý thuyết lượng tử và nguyên lý bất định chắc chắn chi tiết hơn.) Các chip sẽ ngắn mạch. Ngoài ra, nó sẽ tạo ra đủ nhiệt để chiên trứng trên đó. Vì vậy, rò rỉ và nhiệt sẽ phá vỡ định luật của Moore, và việc thay thế sẽ sớm là cần thiết.
Nếu việc đóng gói các bóng bán dẫn trên các chip phẳng đạt tối đa sức mạnh tính toán, Intel đang đặt cược hàng tỷ đô la rằng chip sẽ tăng lên chiều thứ ba. Thời gian sẽ trả lời nếu canh bạc này có trả hết không (một vấn đề lớn với chip 3 chiều là nhiệt sinh ra tăng nhanh theo chiều cao của chip).
Microsoft đang xem xét các tùy chọn khác, chẳng hạn như mở rộng thành 2 chiều với xử lý song song. Một khả năng là trải rộng chip theo chiều ngang liên tiếp từng hàng. Sau đó, bạn chia nhỏ một vấn đề phần mềm thành từng mảnh, sắp xếp từng mảnh trên một con chip nhỏ và lắp lại ở cuối. Tuy nhiên, nó có thể là một quá trình khó khăn và phần mềm phát triển với tốc độ chậm hơn nhiều so với tốc độ theo cấp số nhân tăng áp mà chúng ta đã quen với luật Moore.
Những bước dừng tiêu chuẩn này có thể thêm nhiều năm vào luật Moore. Nhưng cuối cùng, tất cả những điều này cũng phải vượt qua, thêm nữa: lý thuyết lượng tử chắc chắn sẽ chiếm lĩnh. Điều này có nghĩa là các nhà vật lý đang thử nghiệm rất nhiều lựa chọn thay thế sau khi Thời đại Silicon kết thúc, chẳng hạn như máy tính lượng tử, máy tính phân tử, máy tính nano, máy tính DNA, máy tính quang học, v.v. Tuy nhiên, không có công nghệ nào trong số này thì đã sẵn sàng cho câu chuyện chính của thời đại.
THUNG LŨNG KỲ LẠ - THE UNCANNY VALLEY
Nhưng giả sử vào lúc này rằng một ngày nào đó chúng ta sẽ cùng tồn tại với những robot cực kỳ tinh vi, có lẽ sử dụng chip với bán dẫn phân tử thay vì silicon. Chúng ta muốn robot của chúng ta trông giống như chúng ta tới mức nào? Nhật Bản là nhà lãnh đạo thế giới trong việc tạo ra các robot giống với thú cưng và trẻ em đáng yêu, nhưng các nhà thiết kế của họ cẩn thận không làm cho robot của họ trông quá giống con người, điều này có thể gây khó chịu. Hiện tượng này được nghiên cứu đầu tiên bởi Tiến sĩ Masahiro Mori tại Nhật Bản vào năm 1970 và được gọi là "thung lũng kỳ lạ". Nó cho rằng robot trông đáng sợ nếu chúng trông quá giống con người. (Hiệu ứng này thực sự được Darwin nhắc đến lần đầu tiên vào năm 1839 trong The Voyage of the Beagle và một lần nữa bởi Freud vào năm 1919 trong một bài tiểu luận có tựa đề The Uncanny.) Kể từ đó, nó đã được nghiên cứu rất cẩn thận không chỉ bởi các nhà nghiên cứu AI mà còn bởi các nhà làm phim hoạt hình, người quảng cáo và bất kỳ ai quảng bá một sản phẩm liên quan đến các nhân vật. Chẳng hạn, trong một bài phê bình về bộ phim The Polar Express – Tàu Tốc Hành Bắc Cực, một nhà văn của CNN đã lưu ý: "Những nhân vật con người trong phim đi qua thì hết sức ... ôi, đáng sợ. Thật, Polar Express là một sự bối rối tốt nhất, và tồi tệ nhất, từng mảnh kinh Hoàng bé nhỏ."
Theo Tiến sĩ Mori, robot càng giống con người, chúng ta càng cảm thấy đồng cảm với nó, nhưng chỉ đến một điểm. Có một sự nhúng trong sự cảm thông khi robot tiếp cận ngoại hình thực của con người – đó là thung lũng kỳ lạ. Nếu robot trông rất giống với chúng ta trừ một vài tính năng "kỳ lạ", nó sẽ tạo ra cảm giác hồi hộp và sợ hãi. Nếu robot xuất hiện 100% là con người, không thể phân biệt được với bạn và tôi, thì chúng tôi sẽ đăng ký hay xem lại những cảm xúc tích cực.
Điều này có ý nghĩa thực tế. Chẳng hạn, robot có nên cười không? Lúc đầu, dường như rõ ràng là robot nên mỉm cười để chào mọi người và khiến họ cảm thấy thoải mái. Mỉm cười là một cử chỉ phổ quát báo hiệu sự ấm áp và đón chào. Nhưng nếu nụ cười của robot quá thực, nó sẽ khiến người ta nổi da gà. (Ví dụ, mặt nạ Halloween thường có những con ma cà rồng trông thân thiện đang cười toe toét.) Vì vậy, robot chỉ nên mỉm cười nếu chúng giống trẻ con (tức là, với đôi mắt to và khuôn mặt tròn) hoặc hoàn toàn là con người, và không có gì ở giữa. (Khi chúng ta gượng cười, chúng ta hoạt động cơ mặt với <hoạt động đồng thời> vỏ não trước trán. Nhưng khi chúng ta mỉm cười vì chúng ta đang có tâm trạng tốt, các dây thần kinh của chúng ta được điều khiển bởi hệ thống limbic của chúng ta, kích hoạt một bộ cơ bắp hơi khác. Bộ não của chúng ta có thể cho biết sự khác biệt tinh tế giữa hai loại, thứ có lợi cho sự tiến hóa của chúng ta.)
Hiệu ứng này cũng có thể được nghiên cứu bằng cách sử dụng quét não. Giả sử một đối tượng được đặt vào máy MRI và được hiển thị hình ảnh của một robot trông hoàn hảo giống con người, ngoại trừ chuyển động cơ thể của nó hơi giật và có tính máy móc. Bộ não, bất cứ khi nào nó nhìn thấy bất cứ thứ gì, đều cố gắng dự đoán chuyển động của vật thể đó trong tương lai. Vì vậy, khi nhìn vào một con robot có vẻ là con người, bộ não dự đoán rằng nó sẽ di chuyển như con người. Nhưng khi robot di chuyển như một cái máy, có một sự không phù hợp, khiến chúng ta không thoải mái. Cụ thể, thùy đỉnh (parietal lobe) sẽ sáng lên (cụ thể là phần của thùy nơi vỏ não vận động kết nối với vỏ thị giác). Người ta tin rằng các tế bào thần kinh gương mirror neurons tồn tại trong khu vực này của thùy đỉnh. Điều này có ý nghĩa, bởi vì vỏ thị giác thu nhận hình ảnh của robot giống người, và cảm xúc của nó được dự đoán thông qua vỏ não vận động và bởi các tế bào thần kinh gương. Cuối cùng, có khả năng vỏ não quỹ đạo orbitofrontal cortex, nằm ngay sau mắt, đặt mọi thứ lại với nhau và nói, "Hmmm, có gì đó không đúng lắm thì phải."
Các nhà làm phim Hollywood nhận thức được hiệu ứng này. Khi chi hàng triệu đô la để làm phim kinh dị, họ nhận ra rằng cảnh đáng sợ nhất không phải là khi một con quái vật khổng lồ hay hình nhân của Frankenstein nhảy ra khỏi bụi rậm. Cảnh đáng sợ nhất là khi có sự đảo cực trong não, hay là hiện tượng bất chợt có điều vô cùng nghịch lý của thứ rất chi ư là bình thường diễn ra (perversion). Hãy nghĩ về bộ phim The Exorcist/Quỷ Ám. Cảnh nào khiến khán giả nôn mửa khi họ chạy trốn khỏi rạp chiếu hoặc ngất ngay trên ghế? Có phải đó là cảnh khi một con nai xuất hiện? Không. Các rạp chiếu trên khắp thế giới bùng lên trong tiếng la hét chói tai và khán giả khóc nức nở khi Linda Blair quay tròn hoàn toàn cái đầu của cô ấy lại.
Hiệu ứng này cũng có thể được chứng minh ở những con khỉ còn trẻ (young monkey). Nếu bạn cho chúng xem những bức ảnh của Dracula hoặc Frankenstein, chúng chỉ đơn giản là cười phá lên những bức tranh. Nhưng những gì khiến những con khỉ nhỏ này hét lên trong nỗi kinh hoàng là hình ảnh của một con khỉ bị chặt đầu. Một lần nữa, chính sự biến thái cực độ của điều bình thường nhất lại khơi gợi nỗi sợ hãi lớn nhất. (Trong Chương 2, chúng ta đã đề cập rằng lý thuyết ý thức không-thời gian giải thích bản chất của sự hài hước, vì bộ não mô phỏng tương lai của một trò đùa, và sau đó rất ngạc nhiên khi nghe được chuỗi các cú vặn xoắn khác đi – punch line. Điều này tương tự cũng giải thích về tính tự nhiên của nỗi sợ hãi. Bộ não mô phỏng tương lai của một sự kiện bình thường, trần tục, nhưng rồi bị sốc khi mọi thứ đột nhiên trở nên bị thay thế hay biến thái cách khủng khiếp.)
Vì lý do này, robot sẽ tiếp tục trông hơi giống trẻ con, ngay cả khi chúng tiếp cận trí thông minh của con người. Chỉ khi robot có thể hành động thực tế như con người, các nhà thiết kế của chúng mới khiến chúng trông hoàn toàn giống con người.
Ý THỨC SILICON – SILICON CONSCIOUSNESS
Như chúng ta đã thấy, ý thức của con người là một sự chắp vá không hoàn hảo của các khả năng khác nhau được phát triển qua hàng triệu năm tiến hóa. Đưa ra thông tin về thế giới xã hội và thể chất của họ, robot có thể tạo ra các mô phỏng tương tự (hoặc ở một số khía cạnh, thậm chí vượt trội) so với chúng ta, nhưng [ý thức silicon] có thể khác với chúng ta ở hai khu vực chính: Cảm xúc/Emotions và Mục tiêu/Goals.
Trong lịch sử, các nhà nghiên cứu AI đã bỏ qua vấn đề về cảm xúc problem of emotions, coi đó là vấn đề thứ yếu. Mục tiêu là tạo ra một robot có tính logic và lý trí, không bị phân tán và bốc đồng. Do đó, khoa học viễn tưởng về những năm 1950 và 60 đã nhấn mạnh robot (và hình người như Spock trên Star Trek) là thứ có bộ não logic, hoàn hảo.
Chúng ta đã thấy với thung lũng kỳ lạ (uncanny valley) rằng robot sẽ phải nhìn theo một cách nhất định nếu chúng vào nhà của chúng ta, nhưng một số người cho rằng robot cũng phải có cảm xúc để chúng ta có thể gắn kết, chăm sóc và tương tác hiệu quả với chúng . Nói cách khác, robot sẽ cần ý thức cấp II. Để thực hiện điều này, trước tiên robot sẽ phải nhận ra toàn bộ phổ cảm xúc của con người. Bằng cách phân tích các chuyển động trên khuôn mặt tinh tế của lông mày, mí mắt, môi, má, v.v., robot sẽ có thể xác định trạng thái cảm xúc của con người, chẳng hạn như chủ nhân của nó. Một tổ chức đã xuất sắc trong việc tạo ra các robot nhận biết và bắt chước cảm xúc là Phòng thí nghiệm Truyền thông MIT (MIT Media Laboratory). Đôi khi, tôi đã rất vui khi đến thăm phòng thí nghiệm, bên ngoài Boston, trong vài dịp, và nó giống như đến thăm một nhà máy sản xuất đồ chơi cho người lớn. Ở mọi nơi bạn nhìn, bạn sẽ thấy các thiết bị công nghệ cao, tương lai được thiết kế để làm cho cuộc sống của chúng ta có nhiều thú vị, hứng thú và thuận tiện hơn.
Khi tôi nhìn quanh gian phòng kia, tôi thấy nhiều đồ họa công nghệ cao cuối cùng đã tìm được đường vào các bộ phim Hollywood như Báo cáo Thiểu Số Minority Report và Trí thông minh nhân tạo AI. Khi tôi lang thang qua sân chơi tương lai này, tôi tình cờ gặp hai robot hấp dẫn là Huggable và Nexi. Người tạo ra chúng, Tiến sĩ Cynthia Breazeal, giải thích với tôi rằng những robot này có những mục tiêu cụ thể. Huggable là một robot giống gấu bông dễ thương có thể gắn kết với trẻ em. Nó có thể xác định cảm xúc của trẻ em; nó có máy quay video cho mắt, loa cho miệng và cảm biến trên da (vì vậy nó có thể biết khi nào nó đang bị cù léc, chọc hoặc ôm). Rồi cuối cùng, một robot như thế này có thể trở thành một gia sư, người giữ trẻ, phụ tá của y tá hoặc một người bạn chơi đùa.
Nexi, mặt khác, có thể gắn kết với người lớn. Nó trông hơi giống với Pillsbury Doughboy (một linh vật quảng cáo cho công ty Pillspury những năm 1965 đến 2005). Nó có khuôn mặt tròn, phồng, thân thiện, với đôi mắt to có thể cuộn tròn. Nó đã được thử nghiệm tại một viện dưỡng lão và tất cả các bệnh nhân lớn tuổi đều yêu thích nó. Một khi những người lớn tuổi đã quen với Nexi, họ sẽ hôn nó, nói chuyện với nó và nhớ nó khi nó phải rời đi. (Xem hình 12)
Tiến sĩ Breazeal nói với tôi rằng cô ấy đã thiết kế Huggable và Nexi vì cô ấy không hài lòng với những robot trước đó, thứ trông giống như những hộp thiếc chứa đầy dây nhợ, bánh răng và động cơ. Để thiết kế một robot có thể tương tác cảm xúc với mọi người, cô ấy đã cần phải tìm ra cách cô ấy có thể khiến nó trình diễn và gắn kết như chúng ta. Thêm vào đó, cô ấy muốn những con robot không bị mắc kẹt trên kệ phòng thí nghiệm nhưng có thể dấn thân vào thế giới thực. Cựu giám đốc của Phòng thí nghiệm Truyền thông của MIT, Tiến sĩ Frank Moss nói: "Đó là lý do tại sao Breazeal quyết định năm 2004 rằng đã đến lúc tạo ra một thế hệ robot xã hội mới có thể sống ở bất cứ đâu: nhà, trường học, bệnh viện, cơ sở chăm sóc người cao tuổi, v.v."
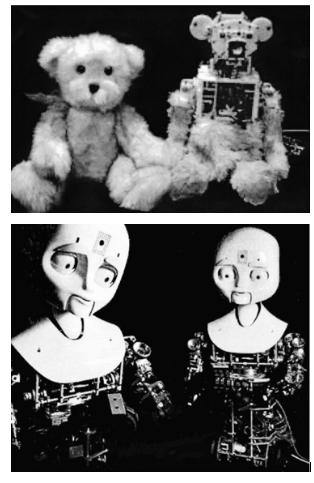
Hình 12. Bên trên là hình robot Huggable, trông giống con gấu. Và bên dưới là hình Nexi, trông giống nhân vật quảng cáo của công ty Pillspury. Là những robot đã được thiết kế tại MIT để tương tác với trẻ em và người già thông qua cảm xúc.
Tại Đại học Waseda ở Nhật Bản, các nhà khoa học đang nghiên cứu một robot có chuyển động ở phần trên của cơ thể (upper-body motions) thể hiện cho cảm xúc (sợ hãi, giận dữ, bất ngờ, vui mừng, ghê tởm, buồn bã) và có thể nghe, ngửi, nhìn và chạm vào. Nó đã được lập trình để thực hiện các mục tiêu đơn giản, như thỏa mãn cơn đói năng lượng và tránh các tình huống nguy hiểm. Mục tiêu của họ là tích hợp các giác quan với cảm xúc, để robot hành động phù hợp trong các tình huống khác nhau.
Không chịu thua kém, Ủy ban châu Âu đang tài trợ cho một dự án đang triển khai, có tên Feelix Growing, nhằm tìm cách thúc đẩy trí thông minh nhân tạo ở Anh, Pháp, Thụy Sĩ, Hy Lạp và Đan Mạch.
TƯƠNG LAI CỦA TÂM TRÍ - MICHIO KAKU
BẢN DỊCH CỦA ĐỖ BÁ HUY
<< Phần trước | Phần tiếp theo >>

![[SÁCH MỚI] Đột Phá 8+ Môn Vật Lí Tập 1 Classic Ôn Thi Đại Học - THPT Quốc Gia Siêu Tiết Kiệm](https://thuvienvatly.com/images/deals/thumb/sach-moi-dot-pha-8-mon-vat-li-tap-1-classic-on-thi-dai-hoc-thpt-quoc-gia-sieu-tiet-kiem.jpg)